| <システム構成>
本システムは、以下の3つに大別することが出来る。
曳航機器
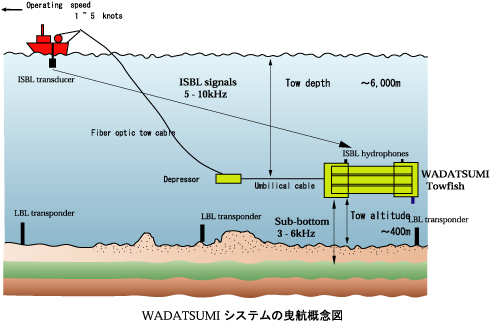
曳航体とディプレッサーから構成される。曳航体は流線型で、サイドスキャン送受波器、姿勢計測器、緊急切り離し装置及び曳航体の電子機器を装備している。この曳航体は、わずかに浮力を持ち調査時にはディプレッサーを用いて水深を維持する。ディプレッサーの重量は1トンである。
デッキ機器
ディーゼル式油圧供給装置、ケーブルを備えたスプーラーウインチ、トランクションウインチ、滑車から構成される。ウインチの操作は、曳航体の投入、回収時は甲板上のコントロール端末を、観測中は第3研究室の遠隔コントロール端末で操作する。曳航ケーブルは1000m出すごとに1トンの張力がかかる。
観測室機器
曳航体制御装置はシステム全体の設定を制御し、曳航ケーブルによる高速リンクを通じて送られてくる音響データと環境データを受信する。データ収録装置は、採取した生データ及び、処理後の音響データと環境データを光ディスクに記録する。その他にウインチ遠隔制御装置から構成されている。
|
|
<主な仕様>
使用周波数:94.737kHz(左舷)、105.882kHz(右舷)
ビーム幅:2.0°
パルス発信間隔:1〜10秒
曳航深度:1〜6000m
曳航高度:15〜500m
曳航可能水深:3〜6000m
データ収録形式:光ディスク
ピクセル数:1024(片舷)2048(両舷)
スワス幅(両舷):50,100,200,500,1000m
ピクセルサイズ:2.5〜50cm
認識限界:0.5〜20m
検出限界:2cm
サブボトムプロファイラー:4〜6kHz
|