|
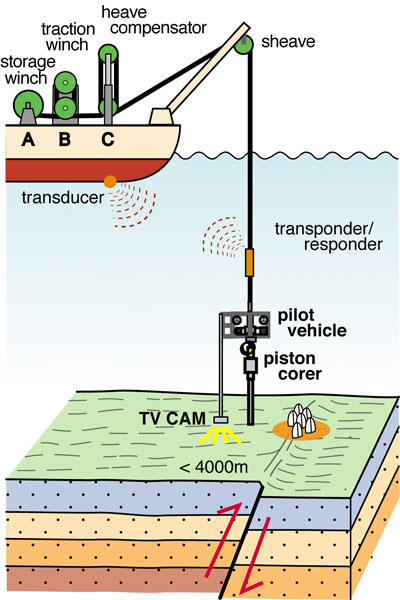
Sampling and measurement in deep sea are usually performed by instruments hanged with a long cable. It is, therefore, not easy to take samples and measure environments in deep sea with pinpoint accuracy. In order to identify the position of the tool and approach the target, a transponder is recently installed on the cable just above the instruments. In contrast, ROV (Remotely Operated Vehicle) or manned submersible, which takes samples by manipulators or measure various kinds of in situ data during seafloor observation, cannot carry heavy instruments to the scientific target.
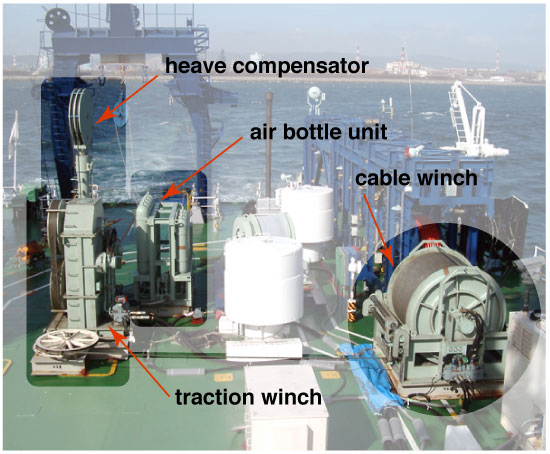
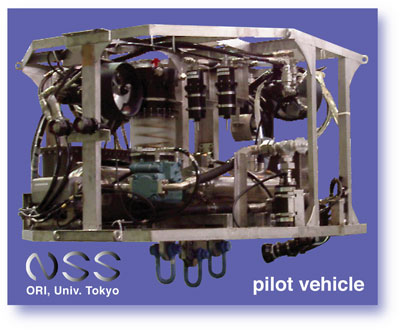
The Ocean Research Institute, University of Tokyo made a conceptual design for the new pinpoint sampling system named "NSS (Navigable Sampling System)" and ordered Mitsui Engineering & Shipbuilding Co., Ltd. to construct it. The NSS consists of a pilot vehicle, tether cable, and portable shipboard equipment (cable winch, hydraulic power unit, etc.) that can be easily used on multipurpose ships. The NSS pilot vehicle has four thrusters to control its position, two underwater TV cameras to observe targets, a hook to release a payload by command from the mother ship, and a data transmission system to collect various kinds of in situ data. The depth capability of the pilot vehicle is 4000 m, and the maximum payload is 1.5 metric tons.
|